I wanted to experiment with a optical mouse sensor, did a websearch, found this blogpost, and adapted the code for my A2620 mouse sensor. As it might be useful to others, below is my Arduino sketch and the processing sketch.
Use the processing sketch to view the image from the sensor, or use a terminal program to ask it for X / Y movement.
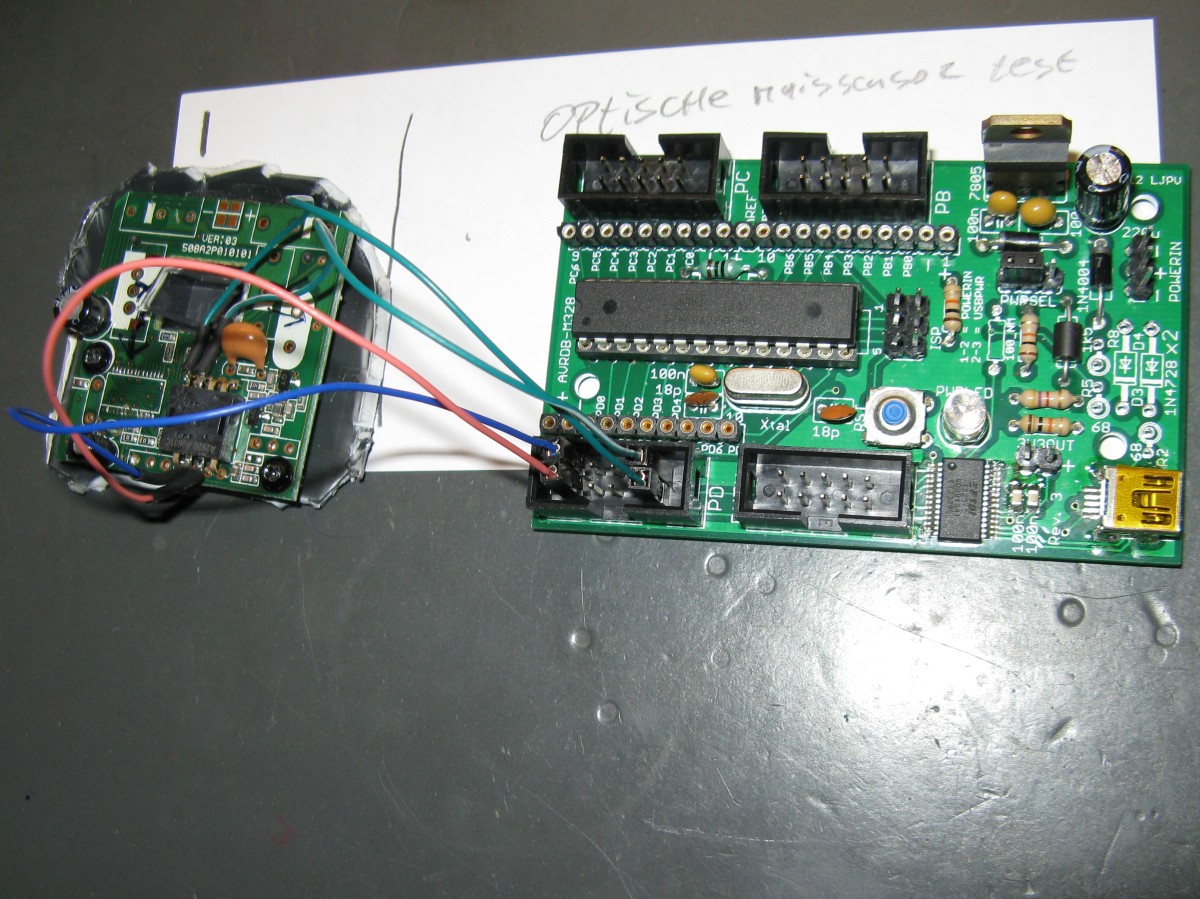
(Yes, that thing to the left used to be a mouse… The thing to the right is an avrdb-m328 board used as an Arduino)
[ Arduino ]
#define FRAMELENGTH 324
#define SCLK 6 // portd.6
#define SDIO 7 // portd.7
byte frame[FRAMELENGTH];
byte flop;
/*
Serial driver for ADNS2010, by Conor Peterson (robotrobot@gmail.com)
Serial I/O routines adapted from Martjin The and Beno?t Rosseau’s work.
Delay timings verified against ADNS2061 datasheet.
The serial I/O routines are apparently the same across several Avago chips.
It would be a good idea to reimplement this code in C++. The primary difference
between, say, the ADNS2610 and the ADNS2051 are the schemes they use to dump the data
(the ADNS2610 has an 18×18 framebuffer which can’t be directly addressed).
This code assumes SCLK is defined elsewhere to point to the ADNS’s serial clock,
with SDIO pointing to the data pin.
Adapted for A2620 on AVRDBM328 by Luke.
*/
const byte regConfig = 0x40; //a2620 . A2610 =0x00
const byte regStatus = 0x41; //a2620 . A2610 =0x01
const byte regPixelData = 0x48; //a2620 . A2610 =0x08
const byte maskNoSleep = 0x01; // unchanged for a2620
const byte maskPID = 0xE0; // idem
const byte regYmov = 0x42; // a2620
const byte regXmov = 0x43; //a2620
void mouseInit(void)
{
digitalWrite(SCLK, HIGH);
delayMicroseconds(5);
digitalWrite(SCLK, LOW);
delayMicroseconds(1);
digitalWrite(SCLK, HIGH);
delay(1025);
writeRegister(regConfig, maskNoSleep); //Force the mouse to be always on.
}
void dumpDiag(void)
{
unsigned int val;
val = readRegister(regStatus);
Serial.print(“Product ID: “);
Serial.println( (unsigned int)((val & maskPID) >> 5));
Serial.println(“Ready.”);
Serial.flush();
}
void writeRegister(byte addr, byte data)
{
byte i;
addr |= 0x80; //Setting MSB high indicates a write operation.
//Write the address
pinMode (SDIO, OUTPUT);
for (i = 8; i != 0; i–)
{
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, addr & (1 << (i-1) ));
digitalWrite (SCLK, HIGH);
}
//Write the data
for (i = 8; i != 0; i–)
{
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, data & (1 << (i-1) ));
digitalWrite (SCLK, HIGH);
}
}
byte readRegister(byte addr)
{
byte i;
byte r = 0;
//Write the address
pinMode (SDIO, OUTPUT);
for (i = 8; i != 0; i–)
{
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, addr & (1 << (i-1) ));
digitalWrite (SCLK, HIGH);
}
pinMode (SDIO, INPUT); //Switch the dataline from output to input
delayMicroseconds(110); //Wait (per the datasheet, the chip needs a minimum of 100 µsec to prepare the data)
//Clock the data back in
for (i = 8; i != 0; i–)
{
digitalWrite (SCLK, LOW);
digitalWrite (SCLK, HIGH);
r |= (digitalRead (SDIO) << (i-1) );
}
delayMicroseconds(110); //Tailing delay guarantees >100 µsec before next transaction
return r;
}
//ADNS2610 dumps a 324-byte array, so this function assumes arr points to a buffer of at least 324 bytes. (A2620: unchanged)
void readFrame(byte *arr)
{
byte *pos;
byte *uBound;
unsigned long timeout;
byte val;
//Ask for a frame dump
writeRegister(regPixelData, 0x2A); // wite anything to pixeldatareg to start at first pixel (A2620)
val = 0;
pos = arr;
uBound = arr + 325;
timeout = millis() + 1000;
//There are three terminating conditions from the following loop:
//1. Receive the start-of-field indicator after reading in some data (Success!)
//2. Pos overflows the upper bound of the array (Bad! Might happen if we miss the start-of-field marker for some reason.)
//3. The loop runs for more than one second (Really bad! We’re not talking to the chip properly.)
while( millis() < timeout && pos < uBound)
{
val = readRegister(regPixelData);
//Only bother with the next bit if the pixel data is valid.
if( !(val & 64) ) {
//Serial.println(“Invalid data.”);
continue;
}
//If we encounter a start-of-field indicator, and the cursor isn’t at the first pixel,
//then stop. (‘Cause the last pixel was the end of the frame.)
if( ( val & 128 ) && ( pos != arr) ) {
// Serial.println(“last pixel read.”);
break;
}
*pos = val & 63;
pos++;
}
}
void setup()
{
pinMode(SCLK, OUTPUT);
pinMode(SDIO, OUTPUT);
Serial.begin(38400);
Serial.println(“Serial established.”);
Serial.flush();
mouseInit();
dumpDiag();
}
void loop()
{
int input;
byte buff;
//readFrame(frame);
if( Serial.available() )
{
input = Serial.read();
switch( input )
{
case ‘f’: // capture frame
Serial.println(“Frame capture.”);
readFrame(frame);
Serial.println(“Done.”);
break;
case ‘d’: // dump frame, raw data
for( input = 0; input < FRAMELENGTH; input++ ) //Reusing ‘input’ here
Serial.write( (byte) frame[input] ); // use serial.write so it does not convert to ascii, –Luke
Serial.write( (byte) 127 );
break;
case ‘p’: // Powerup sequence
mouseInit();
dumpDiag();
break;
case ‘x’: // read X movement register
buff = readRegister(regXmov);
Serial.print((byte) buff);
Serial.print(” “);
break;
case ‘y’: // read Y movement register
buff = readRegister(regYmov);
Serial.print((byte) buff);
Serial.print(” “);
break;
case ‘s’: // Shutdown
writeRegister(regConfig,0xE0);
Serial.print(“Shutdown”);
break;
case ‘i’: // Dump frame values seperated and human readable
for( input = 0; input < FRAMELENGTH; input++ ){ //Reusing ‘input’ here
Serial.print( (byte) frame[input]);
Serial.print( ” “);
// maybe find something to print LF each 18th datapoint?
}
Serial.print( (byte)127 );
break;
case ‘t’: // test image
for( input = 0; input < FRAMELENGTH; input++ ){ //Reusing ‘input’ here
Serial.write( (byte) input%64);
}
Serial.write( (byte) 127 );
break;
}
Serial.flush();
}
}
[ / arduino]
[Processing]
import processing.serial.*;
final int rate = 38400;
final int off_x = 75;
final int off_y = 70;
final int sz = 22;
final int frameX = 18;
final int frameY = 18;
final int frameLen = frameX * frameY;
Serial port;
int[] frame;
int serialCounter;
int nextFrameTime;
int framePeriod = 1000;
void setup()
{
size( 550, 550 );
frameRate(12);
frame = new int[frameLen];
initSerial();
noStroke();
noSmooth();
nextFrameTime = millis();
}
void draw()
{
serialHandler();
if( millis() >= nextFrameTime )
{
requestFrame();
background(245);
for( int i = 0; i < frameLen; i++ )
{
fill( map(frame[i], 0, 63, 0, 255) );
rect(off_x + (i % frameX * sz),
off_y + (i / frameY * sz),
sz, sz);
}
nextFrameTime = millis() + framePeriod;
}
}
void keyPressed()
{
if( key == ‘f’ )
port.write(‘f’);
if( key == ‘ ‘ )
requestFrame();
if( key == ‘t’ )
{
port.write(‘t’); // test frame
serialCounter = frameLen;
}
}
void initSerial()
{
String portName = “/dev/ttyUSB0”;
port = new Serial(this, portName, rate);
println(“Using ” + portName + ” as serial device.”);
}
void requestFrame()
{
port.write(‘d’); // dump normal frame
serialCounter = frameLen;
port.write(‘f’); // request new frame
}
void serialHandler()
{
int incoming;
while( port.available() != 0 )
{
incoming = port.read();
print(incoming + ” “);
if( serialCounter > 0 )
{
if( incoming == 127 )
serialCounter = 0;
else
{
frame[serialCounter – 1] = incoming;
serialCounter–;
}
}
}
}
[/processing]
Leave a Reply